創新研發 基于圖像識別與北斗定位的智能停車調研系統,引領軟硬件一體化解決方案新浪潮

在城市化進程加速與汽車保有量持續攀升的背景下,停車難、管理亂、效率低已成為困擾城市治理與公眾出行的普遍難題。傳統的停車調研與管理系統依賴人工巡檢、簡單傳感或單一的GPS定位,存在數據精度不足、實時性差、成本高昂且難以大規模部署等痛點。為此,我們聚焦計算機軟硬件的深度研發與系統集成,創新性地提出了融合前沿圖像識別技術與高精度北斗衛星定位的智能停車調研解決方案,旨在為城市規劃、商業運營及智慧交通管理提供精準、高效、可擴展的數據與服務支撐。
一、 核心技術融合:圖像識別與北斗定位的雙擎驅動
本創新項目的核心在于兩大關鍵技術的深度融合與協同應用。
- 高精度北斗定位技術:依托我國自主建設的北斗衛星導航系統,提供全天候、全天時、高精度的定位、導航與授時服務。在停車場景中,我們研發的專用硬件終端能夠實現亞米級甚至厘米級的精確定位,準確標識停車車輛的地理位置,并記錄時間戳。這不僅解決了地下車庫、城市峽谷等復雜環境下的信號覆蓋與精度問題,更確保了數據源的國家安全與自主可控。
- 智能圖像識別技術:基于深度學習的計算機視覺算法,我們的系統能夠通過部署的攝像頭或移動采集設備,自動識別車輛特征(如車牌號、車型、顏色)、停車狀態(駛入、停穩、駛離)以及車位占用情況。通過多角度、多幀圖像的分析與融合,極大提升了車牌識別率與狀態判斷的準確性,有效克服了光線變化、遮擋等干擾因素。
雙技術協同工作流程:當車輛進入監測區域,北斗定位模塊率先捕獲其精確坐標并觸發圖像采集;AI視覺模型隨即對圖像進行分析,提取車輛身份與行為信息;兩者數據在邊緣計算單元或云端進行時空對齊與融合,生成一條包含“何時、何地、何車、何種狀態”的完整停車事件記錄。這種“北斗定界,圖像辨物”的模式,構成了系統高可靠性的數據基石。
二、 軟硬件一體化研發:從數據采集到智能分析的全棧創新
我們的創新不僅停留在算法層面,更貫穿于從硬件設備到軟件平臺的全鏈條研發。
- 專用硬件研發與銷售:
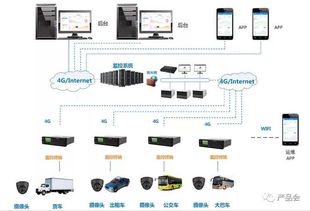
- 智能停車巡檢終端:集成北斗高精度定位模組、高性能圖像傳感器、邊緣計算芯片及4G/5G通信模塊的便攜式或車載式設備。具備低功耗、長續航、堅固耐用等特點,適用于移動式停車普查與動態監測。
- 固定式車位監測設備:針對路內停車位或停車場,開發小型化、低成本的專用攝像頭與地磁/射頻復合傳感器,結合北斗定位增強基站,實現車位的全天候無人化精準監測。
- 硬件產品均提供標準化接口,支持靈活部署與規模化銷售,為各類客戶提供可靠的“端”側數據入口。
- 軟件平臺研發與銷售:
- 數據匯聚與管理平臺:接收、清洗、存儲來自各類硬件的海量時空數據與圖像數據,建立統一的停車資源數據庫。
- 智能分析云服務平臺:運用大數據分析、機器學習模型,提供豐富的分析功能:包括停車熱點識別、周轉率計算、泊位需求預測、違章停車預警、收費模擬分析等。平臺支持生成可視化報表與動態圖表,為調研報告與決策提供直觀支持。
- API接口與SaaS服務:向政府交通部門、商業停車場運營商、城市規劃設計院、地圖導航服務商等客戶,提供標準化的數據接口或軟件即服務(SaaS)訂閱,實現停車數據的價值轉化與業務賦能。
三、 應用場景與市場價值:超越調研的多元化服務
“基于圖像識別與北斗定位的停車調研系統”最初雖為精準停車普查而生,但其產生的實時、精準數據流,能衍生出廣泛的市場應用,創造顯著價值:
- 城市智慧停車管理:為路內停車收費、停車場導引、共享停車、違停執法提供實時數據支撐,提升管理效率與收入。
- 商業與交通規劃:為新建商業綜合體、住宅區、交通樞紐的配建停車場規模與布局提供科學依據。
- 靜態交通評估與決策:長期監測區域停車供需變化,評估政策效果(如限行、收費調整),支持智慧城市頂層設計。
- 自動駕駛與車路協同:提供高精度的動態車位地圖,作為自動駕駛車輛尋找泊車位的關鍵信息服務。
四、
將圖像識別與北斗定位技術深度融合,并貫穿于軟硬件一體化的研發與銷售中,不僅是對傳統停車調研方法的一次革命性升級,更是開拓智慧交通靜態管理新藍海的關鍵舉措。我們致力于通過持續的技術創新與產品迭代,為客戶提供從精準數據采集到深度智能分析的全套解決方案,助力破解城市停車困局,推動智能交通產業的發展與升級,最終實現社會效益與商業價值的共贏。
如若轉載,請注明出處:http://www.wndaj.cn/product/66.html
更新時間:2026-01-06 11:02:12